|
FingerEye: Continuous and Unified Vision-Tactile Sensing for Dexterous Manipulation
|
|
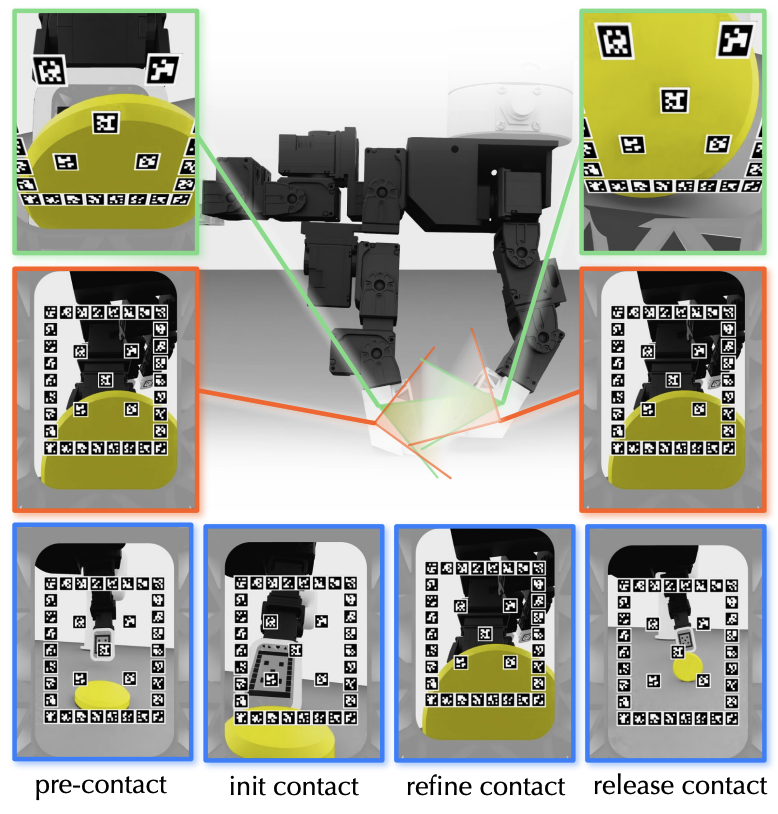
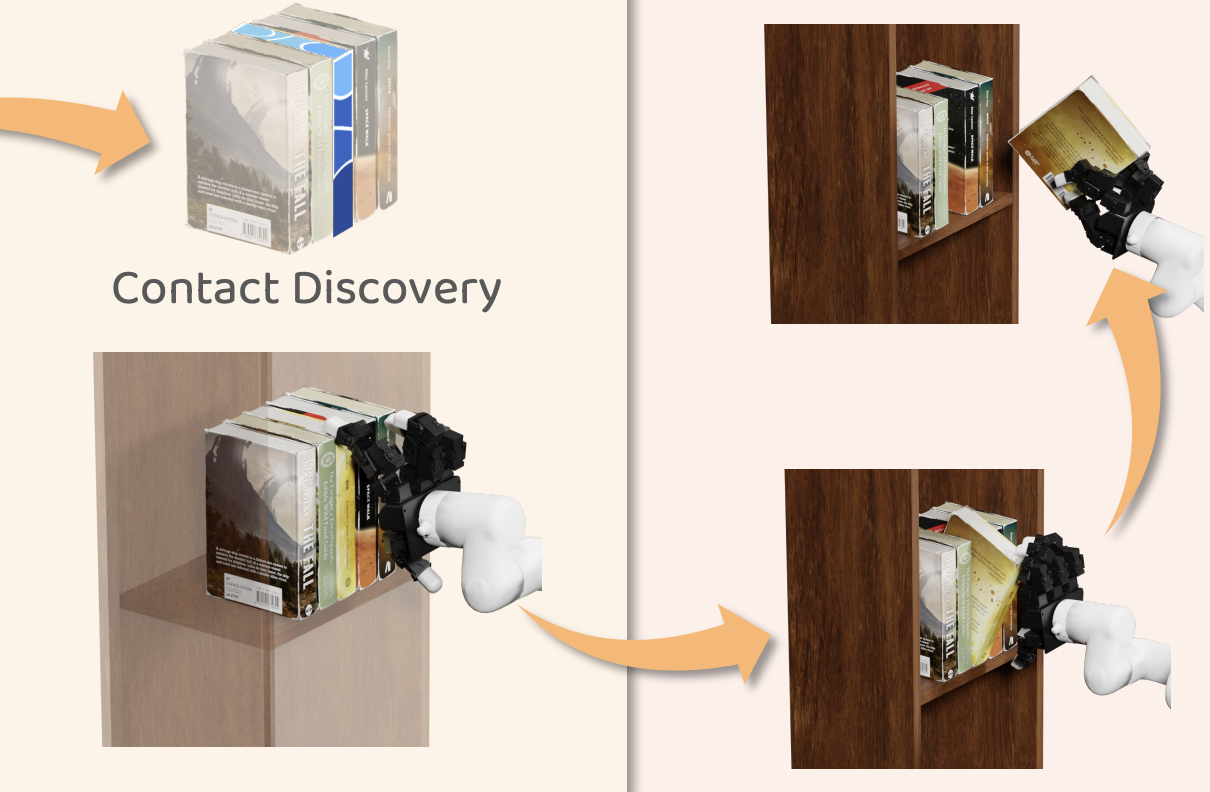
Contact Explorer: Contact Coverage-Guided Exploration for General-Purpose Dexterous Manipulation
|
|
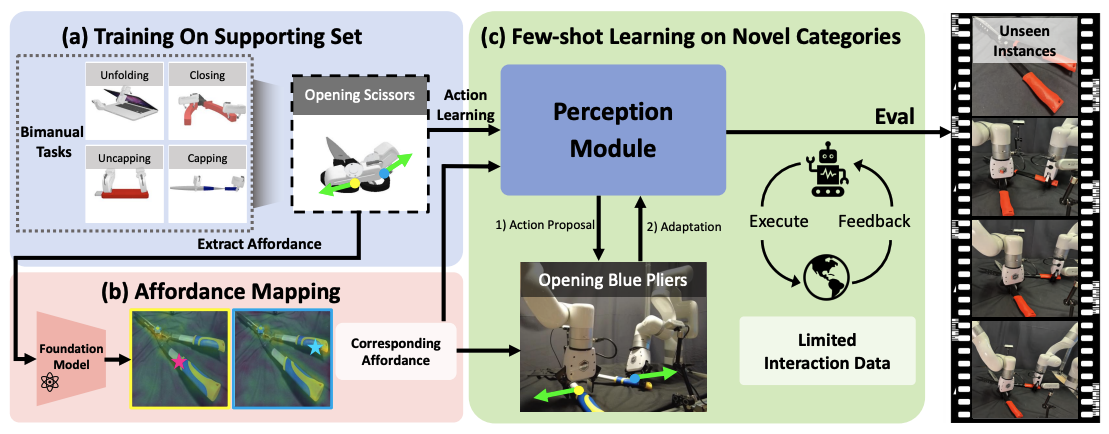
Bi-Adapt: Few-shot Bimanual Adaptation for Novel Categories of 3D Objects via Semantic Correspondence
|
|
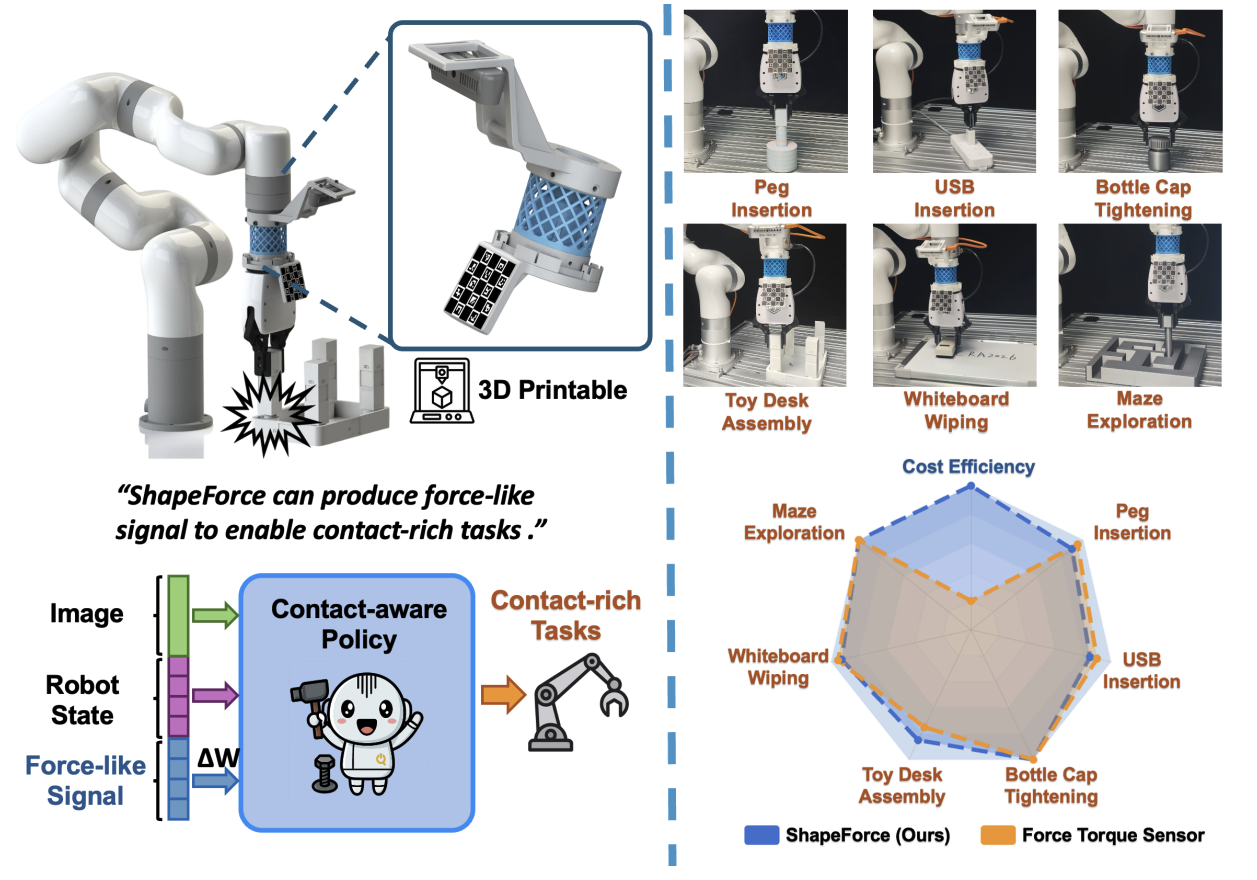
ShapeForce: Low-Cost Soft Robotic Wrist for Contact-Rich Manipulation
|
|
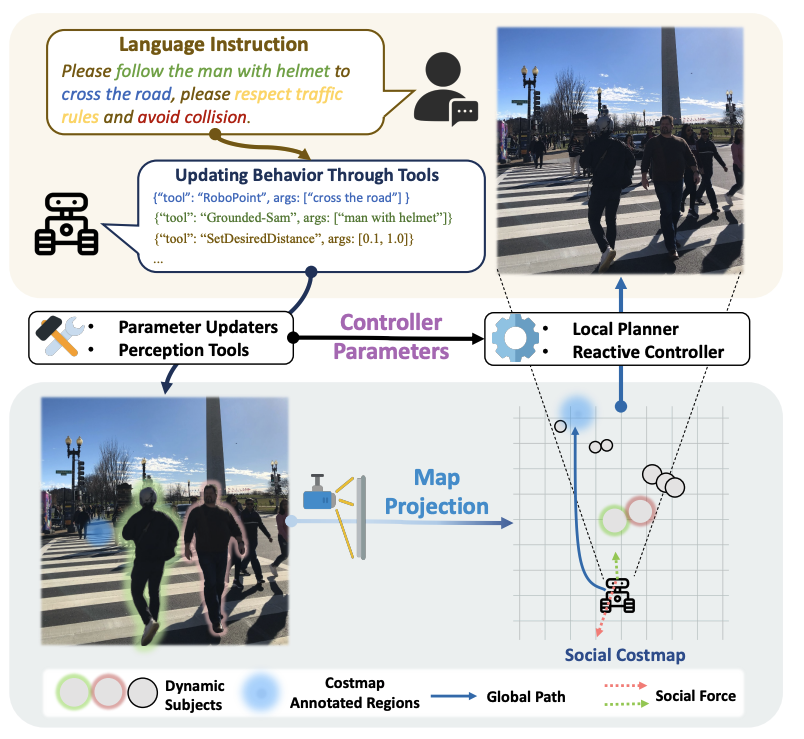
LISN: Language-Instructed Social Navigation with VLM-based Controller Modulating
|
|
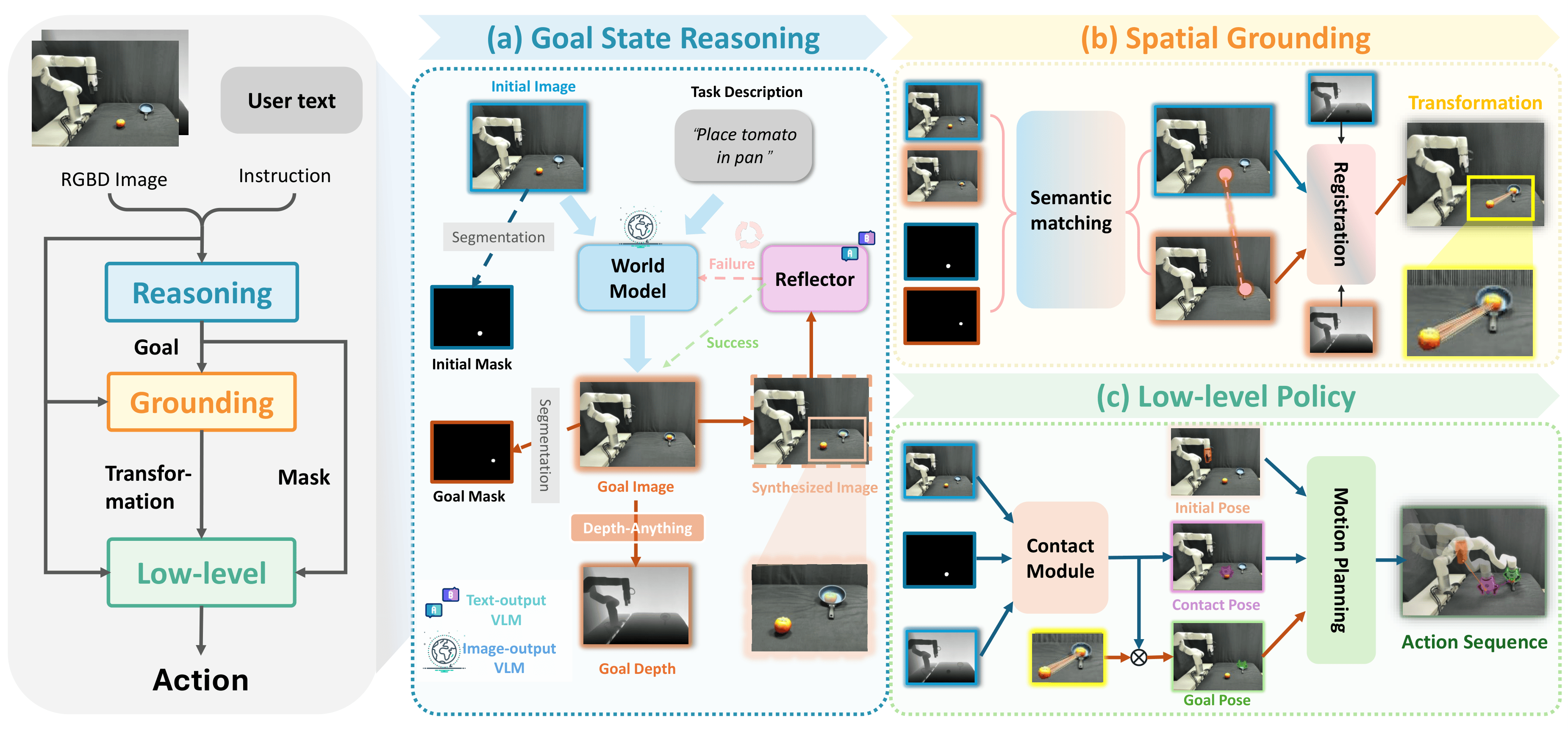
Goal-VLA: Image-Generative VLMs as Object-Centric World Models Enable Zero-shot Robot Manipulation
|
|
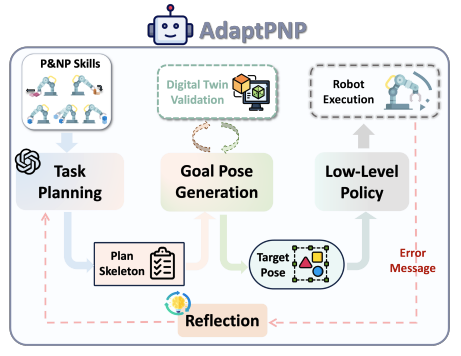
AdaptPNP: Integrating Prehensile and Non-Prehensile Skills for Adaptive Robotic Manipulation
|
|
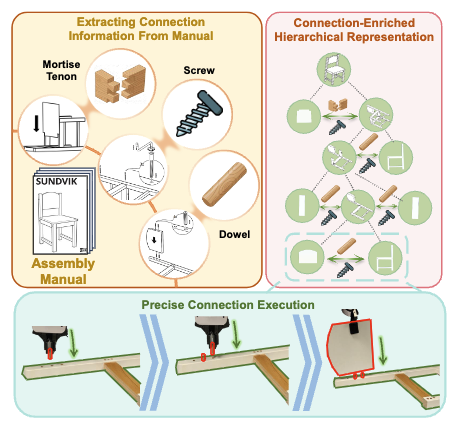
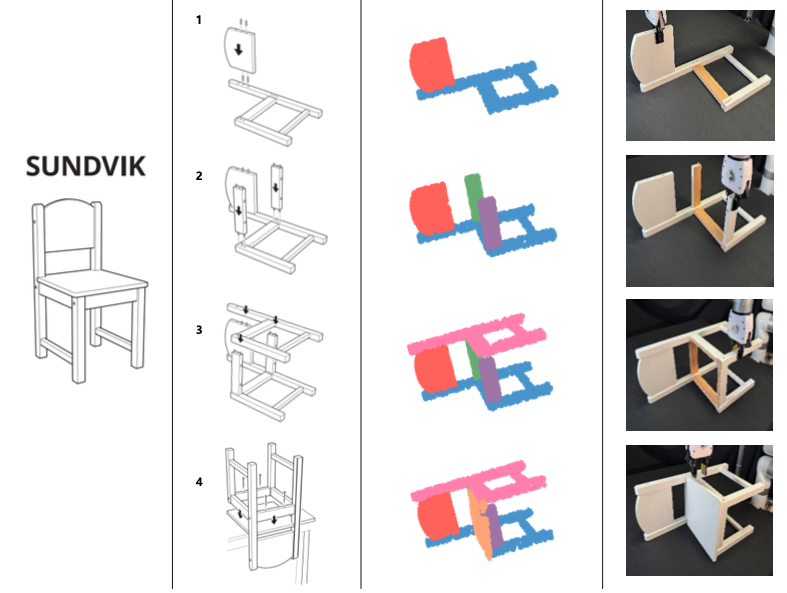
Manual2Skill++: Connector-Aware General Robotic Assembly from Instruction Manuals via Vision-Language Models
|
|
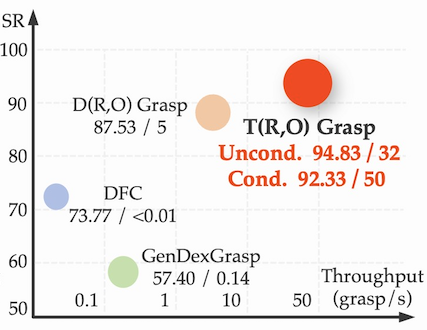
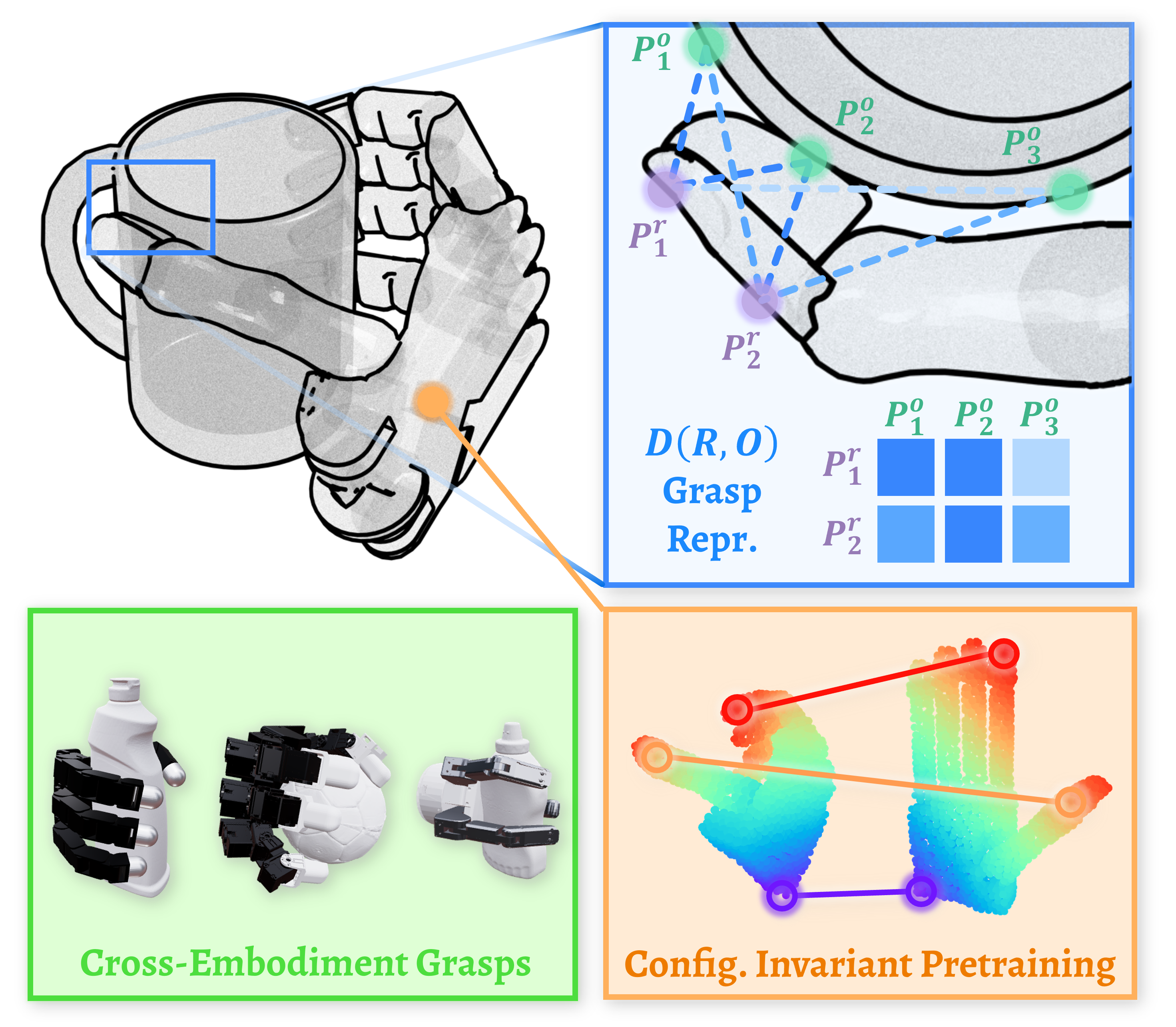
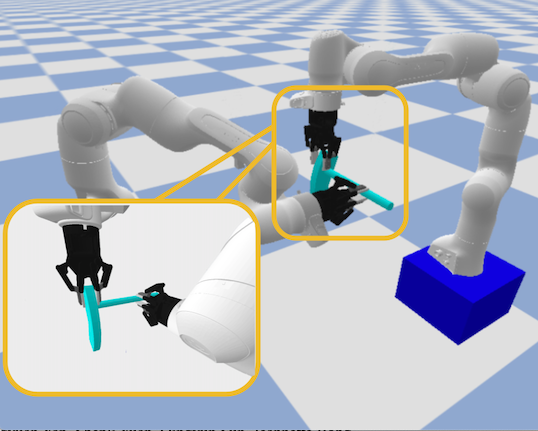
T(R,O) Grasp: Efficient Graph Diffusion of Robot-Object Spatial Transformation for Cross-Embodiment Dexterous Grasping
|
|
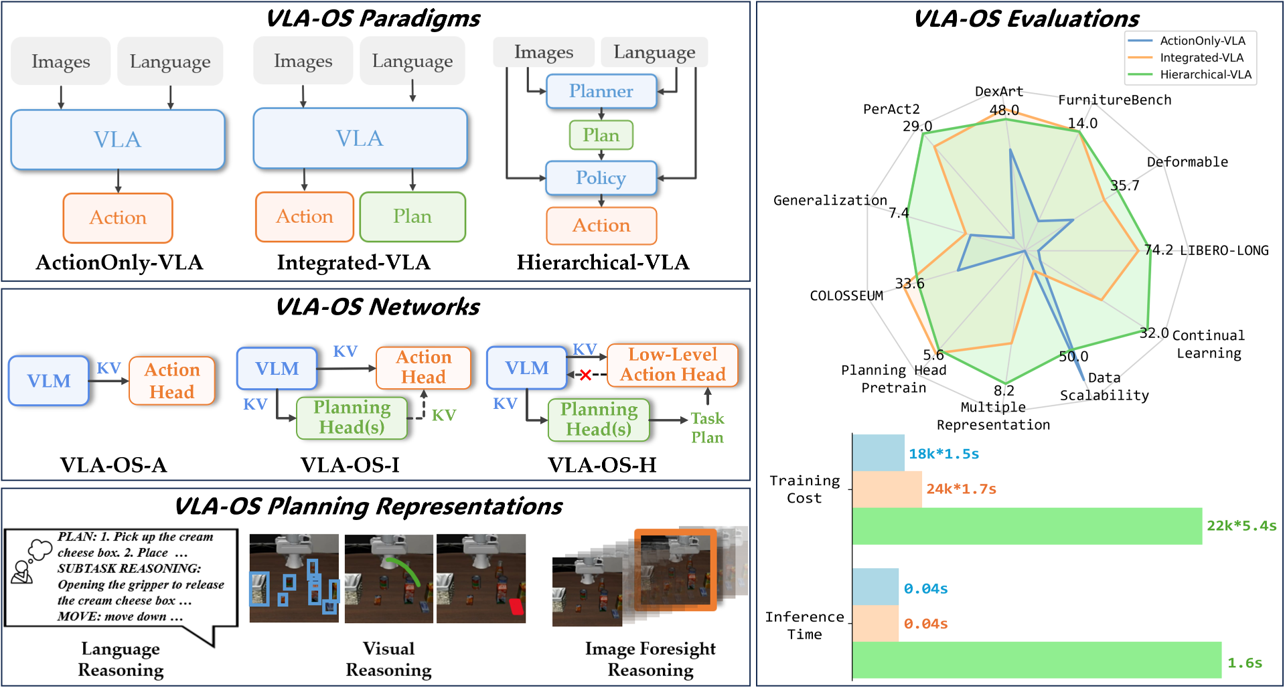
VLA-OS: Structuring and Dissecting Planning Representations and Paradigms in Vision-Language-Action Models |
|
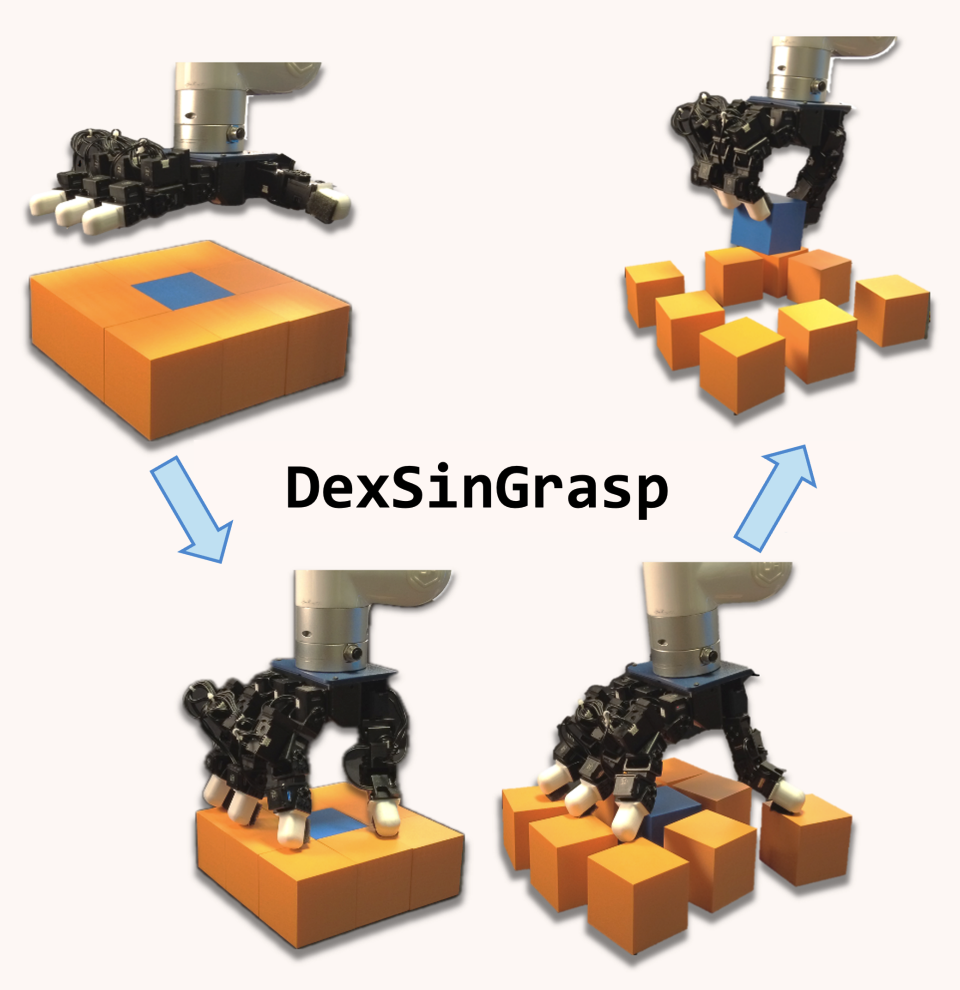
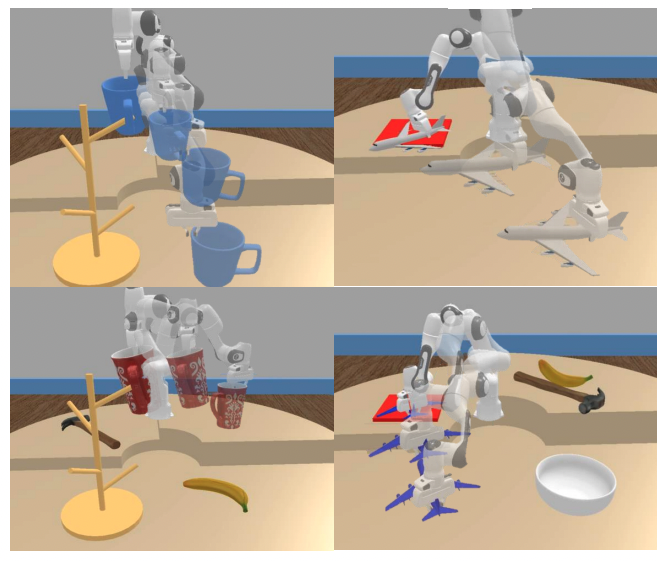
DexSinGrasp: Learning a Unified Policy for Dexterous Object Singulation and Grasping in Cluttered Environments |
|
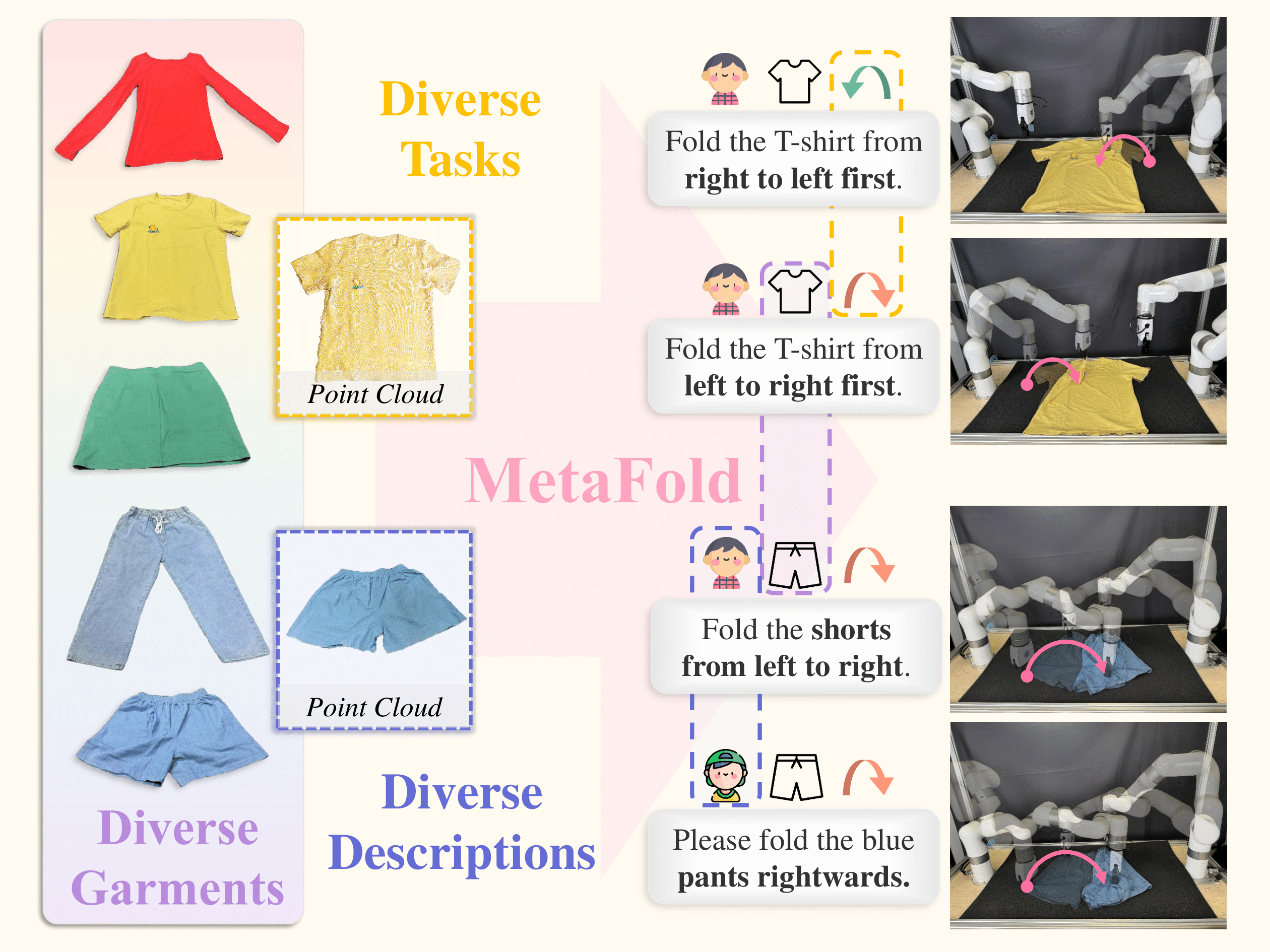
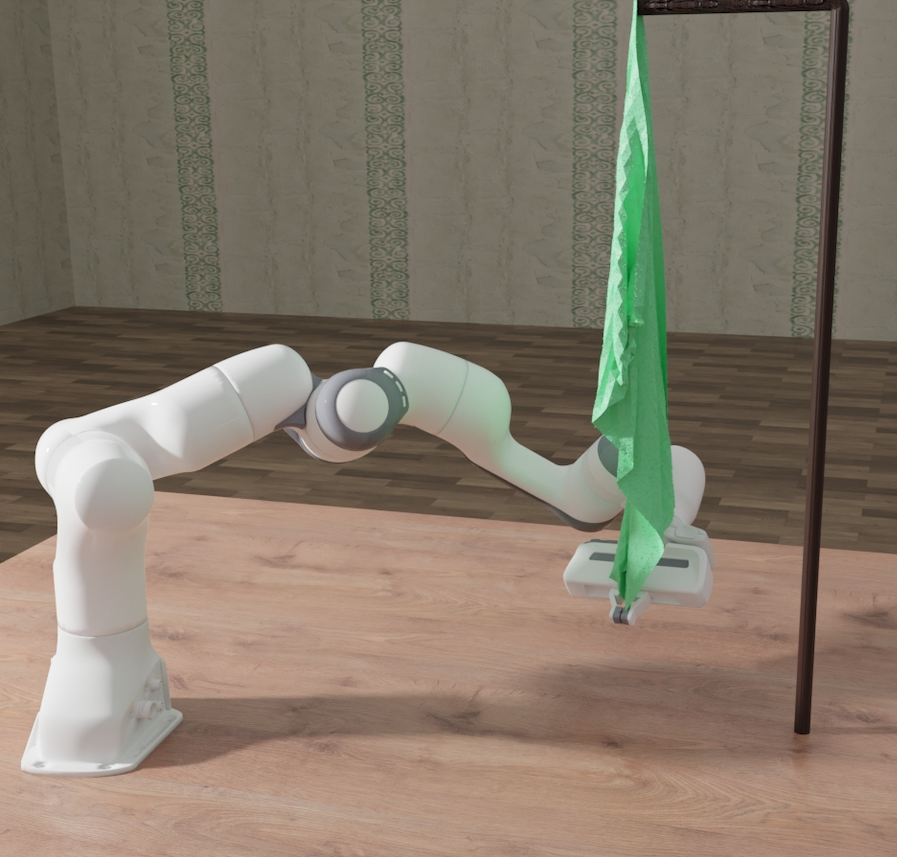
MetaFold: Language-Guided Multi-Category Garment Folding Framework via Trajectory Generation and Foundation Model |
|
Manual2Skill: Learning to Read Manuals and Acquire Robotic Skills for Furniture Assembly Using Vision-Language Models |
|
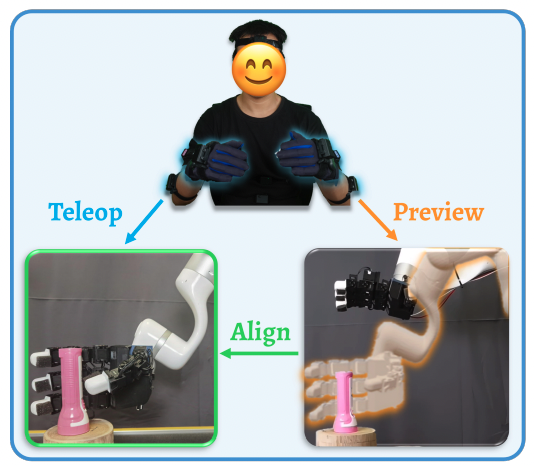
TelePreview: A User-Friendly Teleoperation System with
Virtual Arm Assistance for Enhanced Effectiveness |
|
EMOS: Embodiment-aware Heterogeneous Multi-robot Operating System with LLM Agents |
|
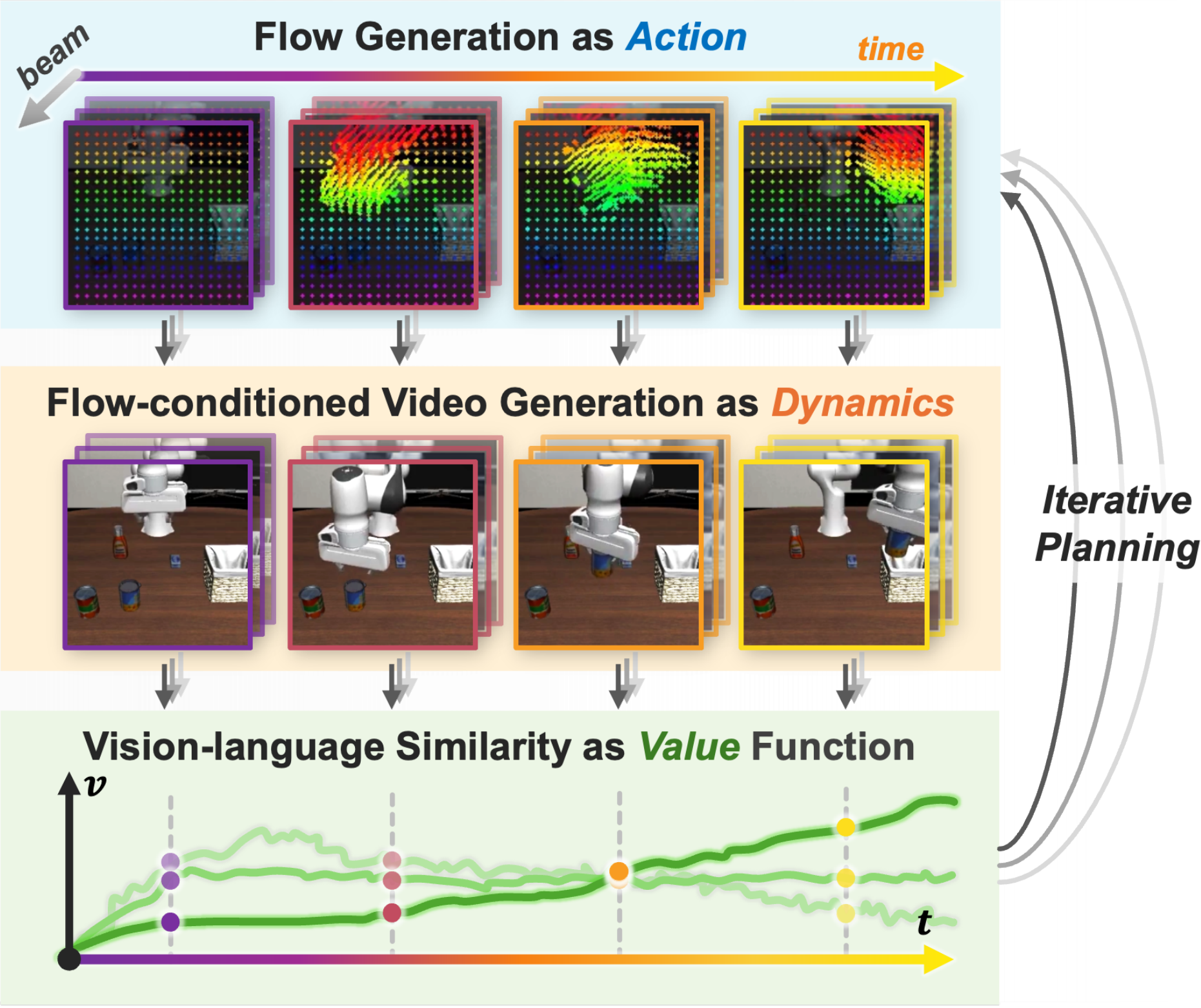
FLIP: Flow-Centric Generative Planning as General-Purpose Manipulation World Model |
|
D(R,O) Grasp: A Unified Representation of Robot and Object Interaction for Cross-Embodiment Dexterous Grasping |
|
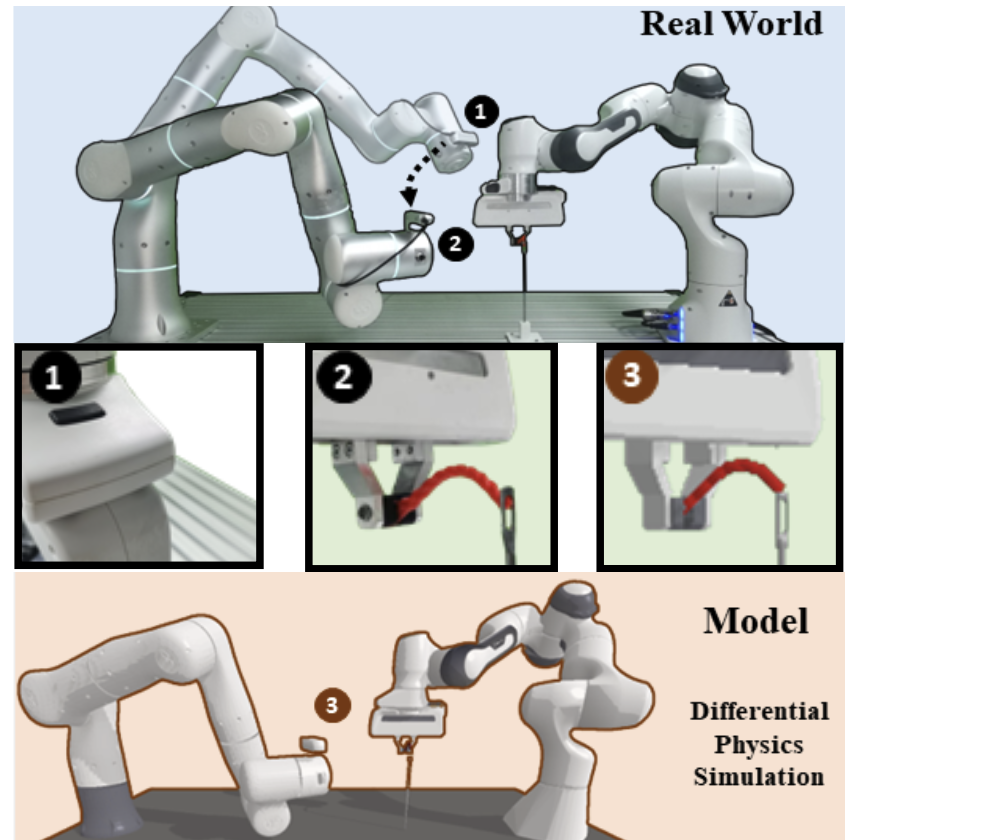
TieBot: Model-based Learning to Knot a Tie from Visual
Demonstration via Differentiable Physics-based Simulation |
|
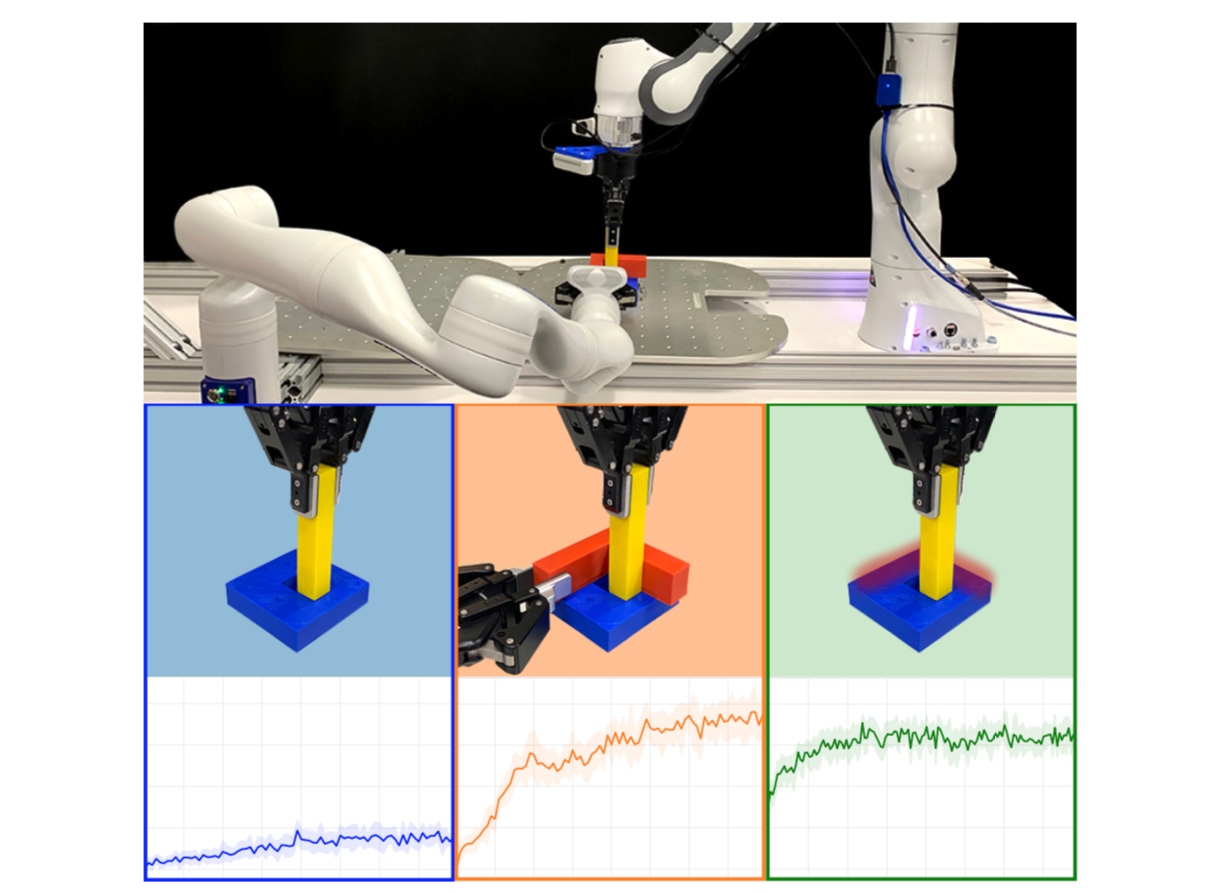
RiEMann: Near Real-Time SE(3)-Equivariant Robot Manipulation without Point Cloud Segmentation |
|
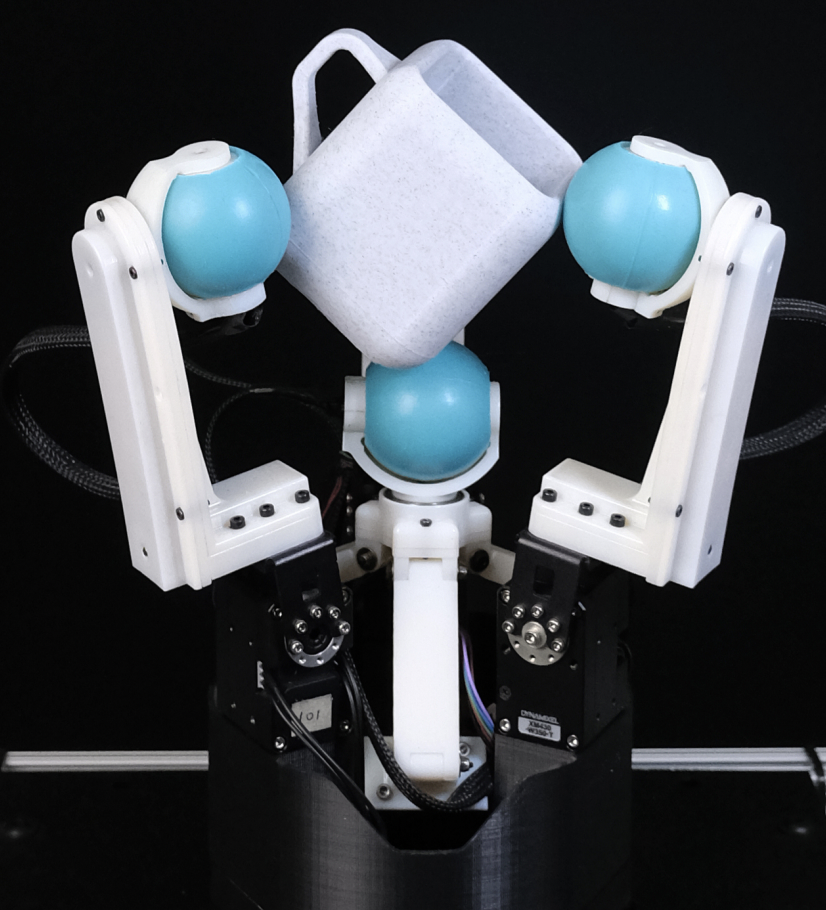
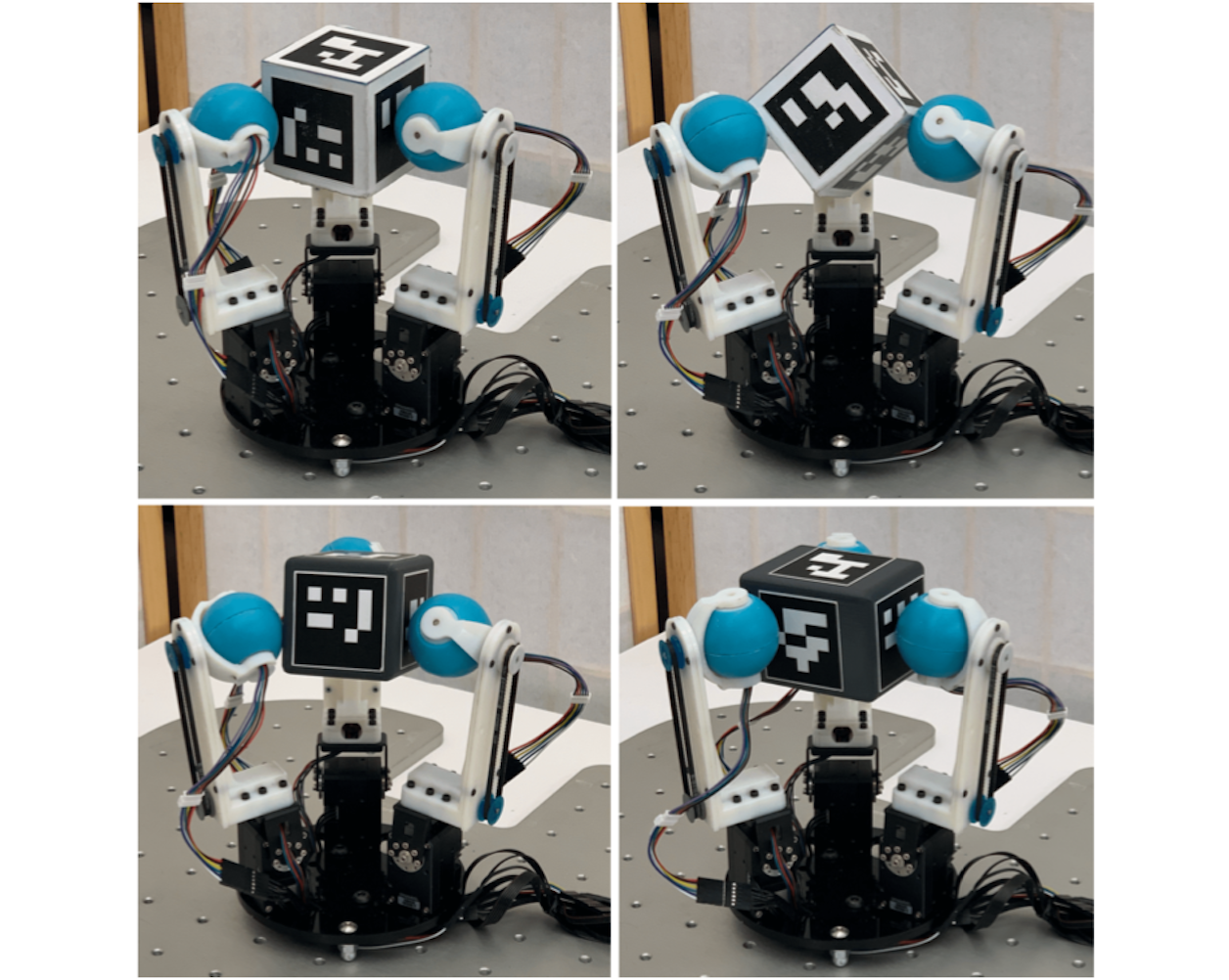
Design and Control of Roller Grasper V3 for
In-Hand Manipulation |
|
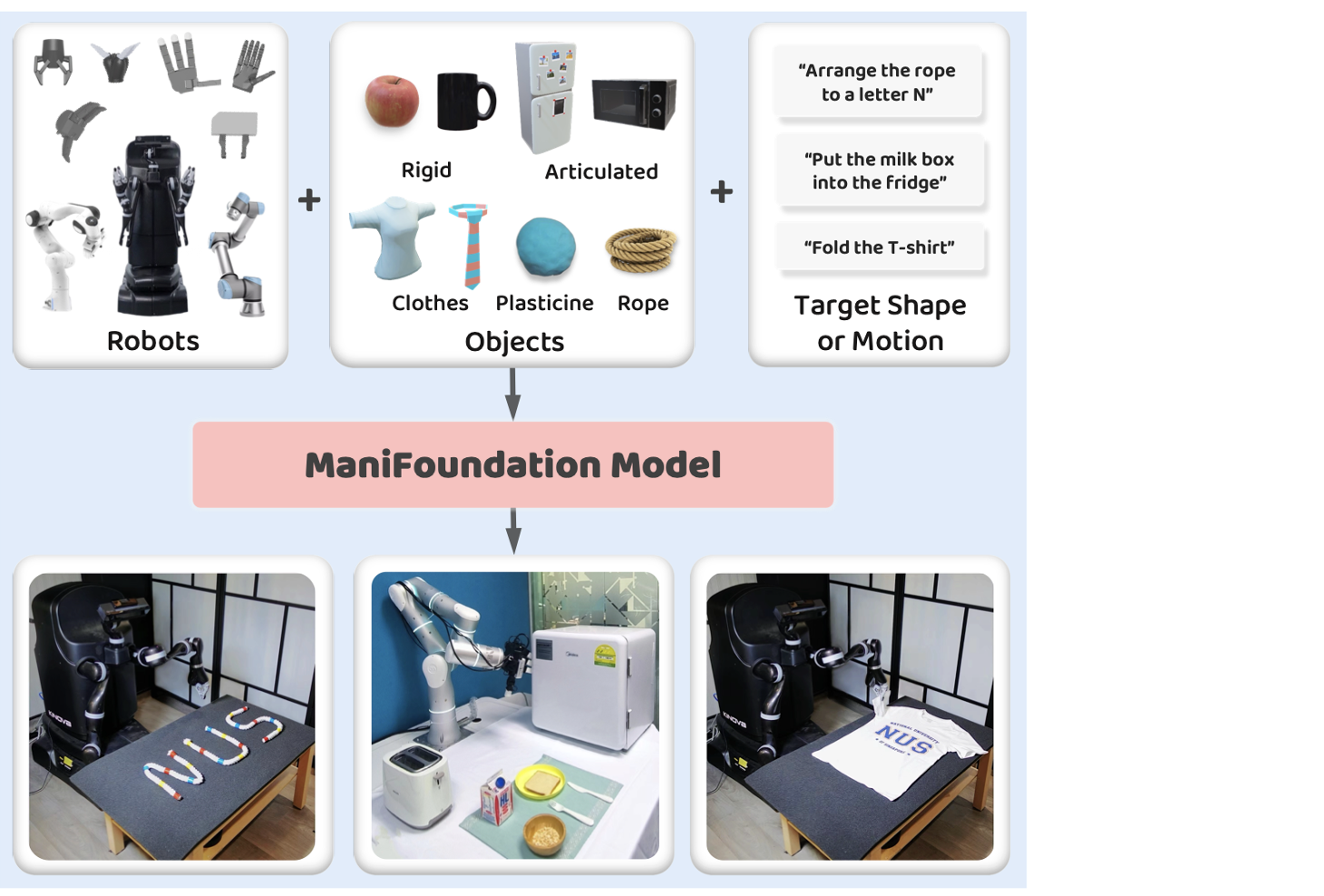
ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots |
|
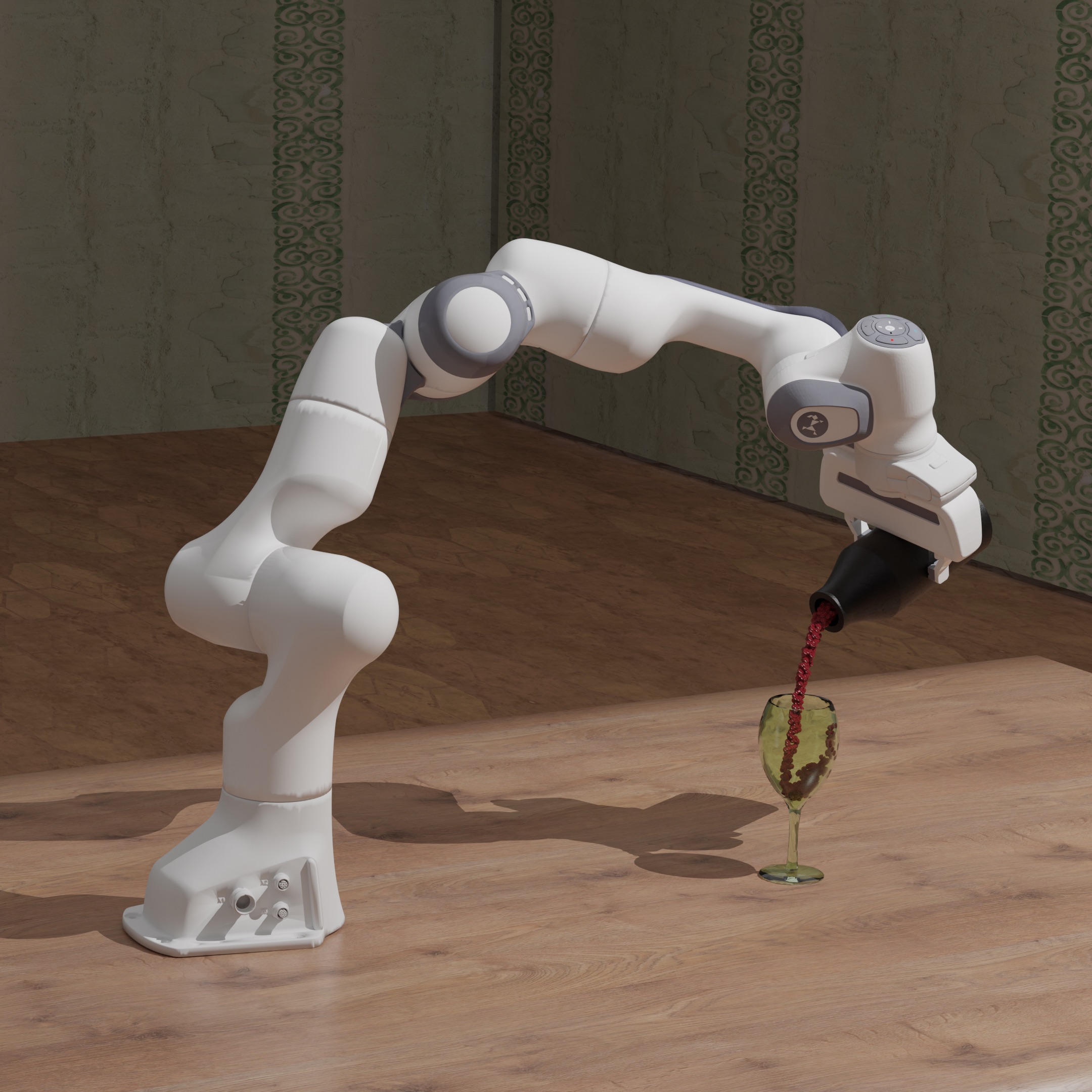
SoftMAC: Differentiable Soft Body Simulation with Forecast-based Contact
Model and Two-way Coupling with Articulated Rigid Bodies and Clothes |
|
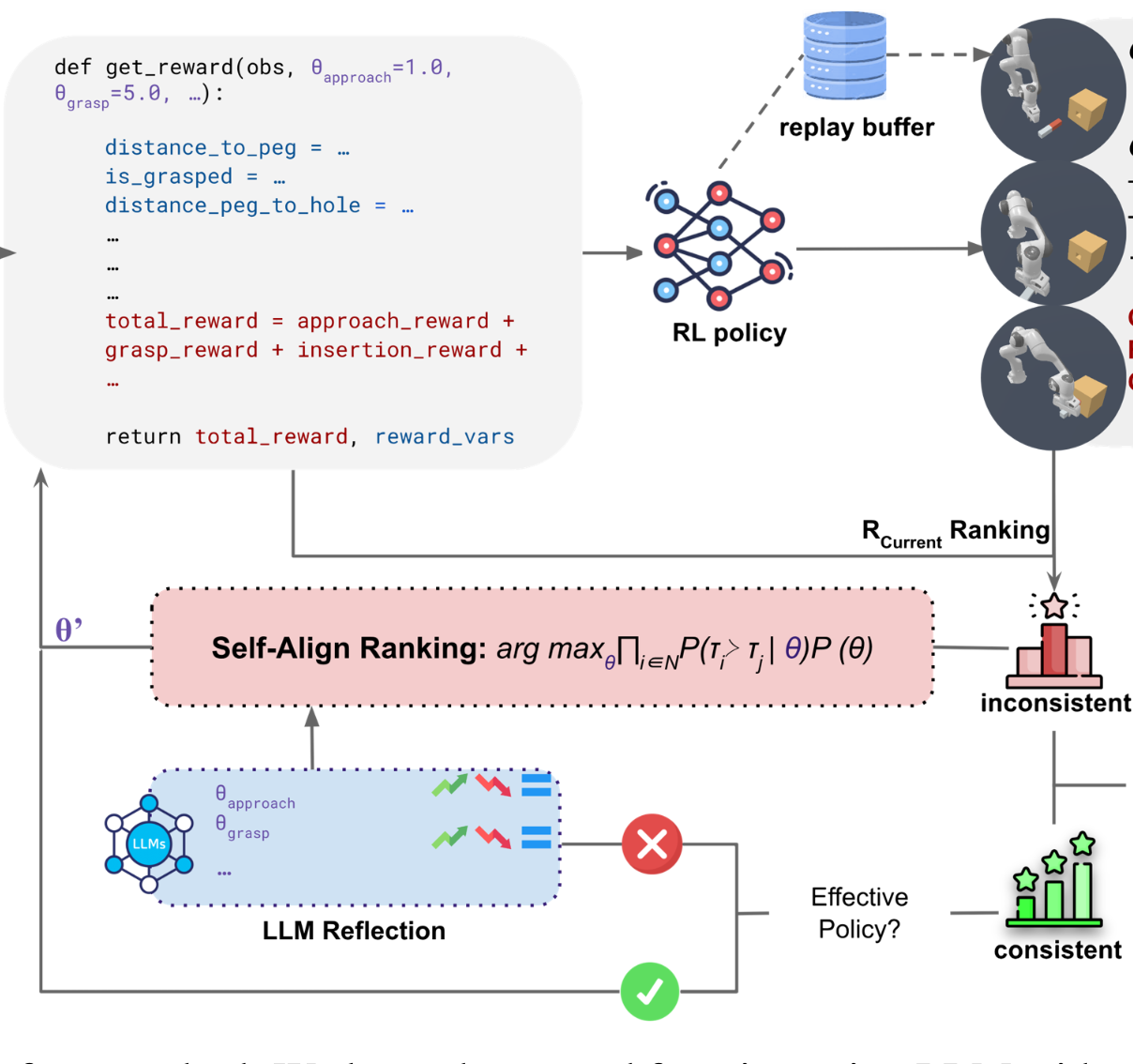
Learning Reward for Robot Skills Using Large Language Models via
Self-Alignment |
|
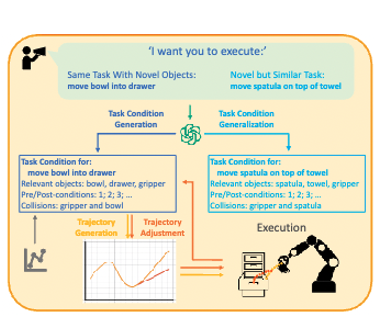
Generalizable Long-Horizon Manipulations
with Large Language Models |
|
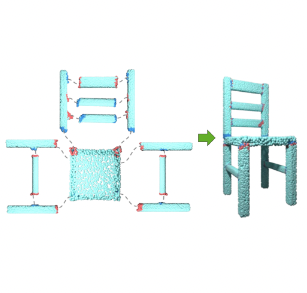
Category-Level Multi-Part Multi-Joint 3D Shape Assembly |
|
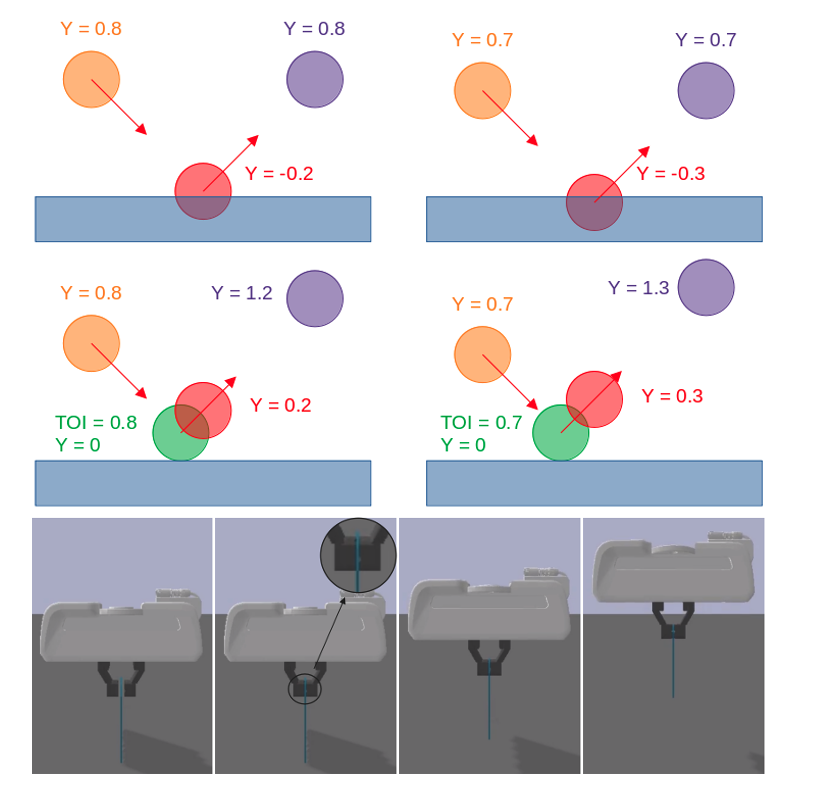
Jade: A Differentiable Physics Engine for Articulated Rigid Bodies with Intersection-Free Frictional Contact |
|
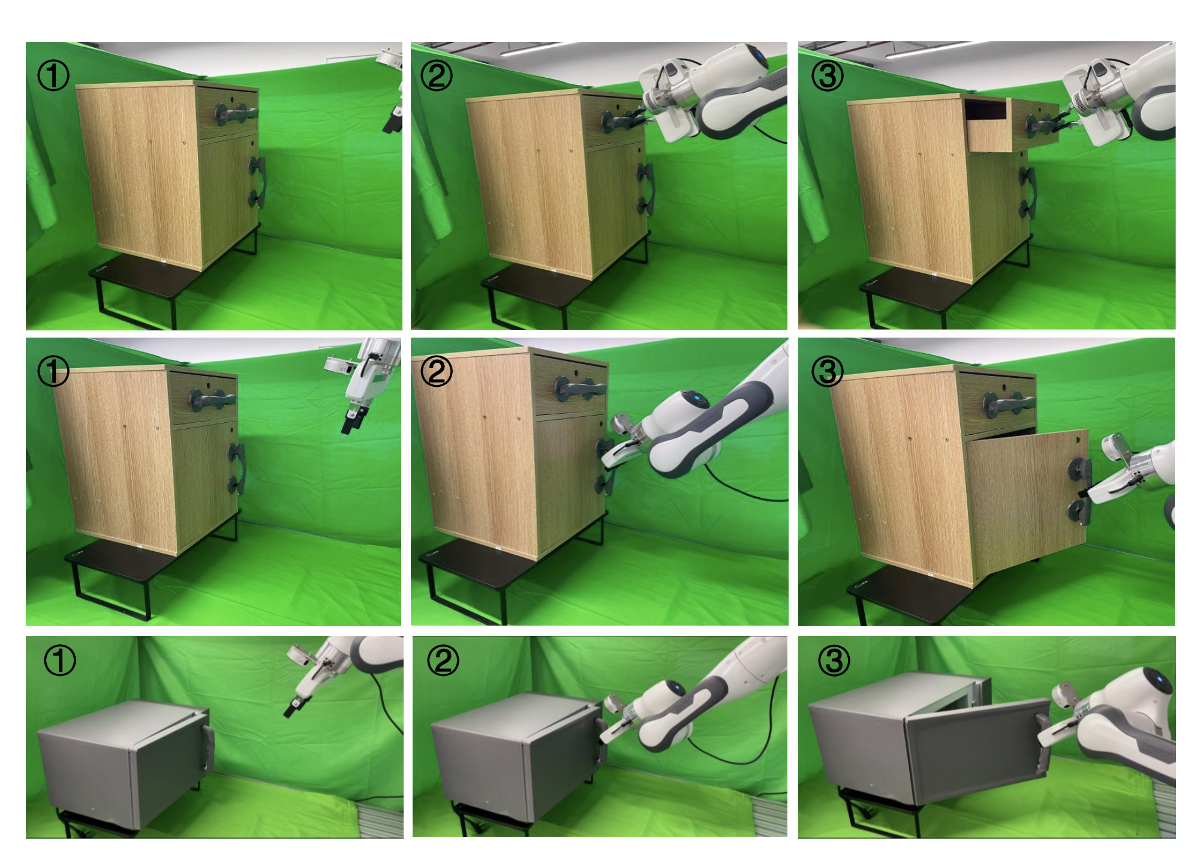
GAMMA: Generalizable Articulation Modeling and Manipulation for Articulated Objects |
|
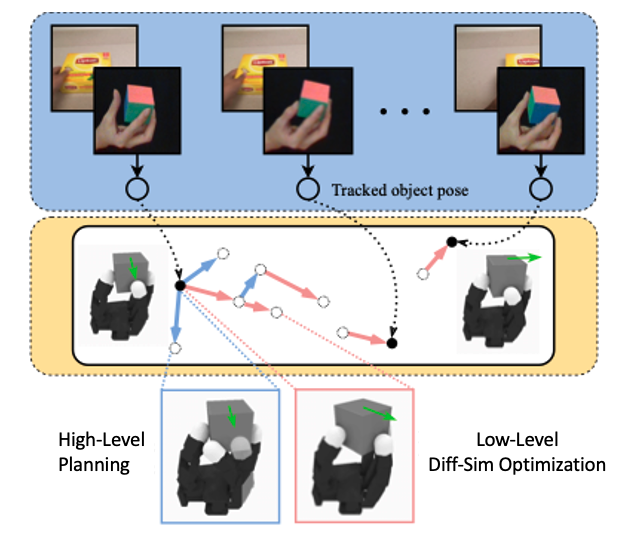
Diff-LfD: Contact-aware Model-based Learning from Visual
Demonstration for Robotic Manipulation via Differentiable Physics-based
Simulation and Rendering |
|
ClothesNet: An Information-Rich 3D Garment Model Repository with Simulated Clothes Environment |
|
DexRepNet: Learning Dexterous Robotic Grasping Network with
Geometric and Spatial Hand-Object Representations |
|
DiffClothAI: Differentiable Cloth Simulation with Intersection-free
Frictional Contact and Differentiable Two-Way Coupling with Articulated Rigid Bodies |
|
SAM-RL: Sensing-Aware Model-based Reinforcement Learning via Differentiable Physics-based Simulation and Rendering |
|
SAGCI-System: Towards Sample-Efficient, Generalizable, Compositional, and Incremental Robot Learning |
|
RoboAssembly: Learning Generalizable Furniture Assembly Policy in a Novel Multi-robot Contact-rich Simulation Environment |
|
Learning to Regrasp by Learning to Place |
|
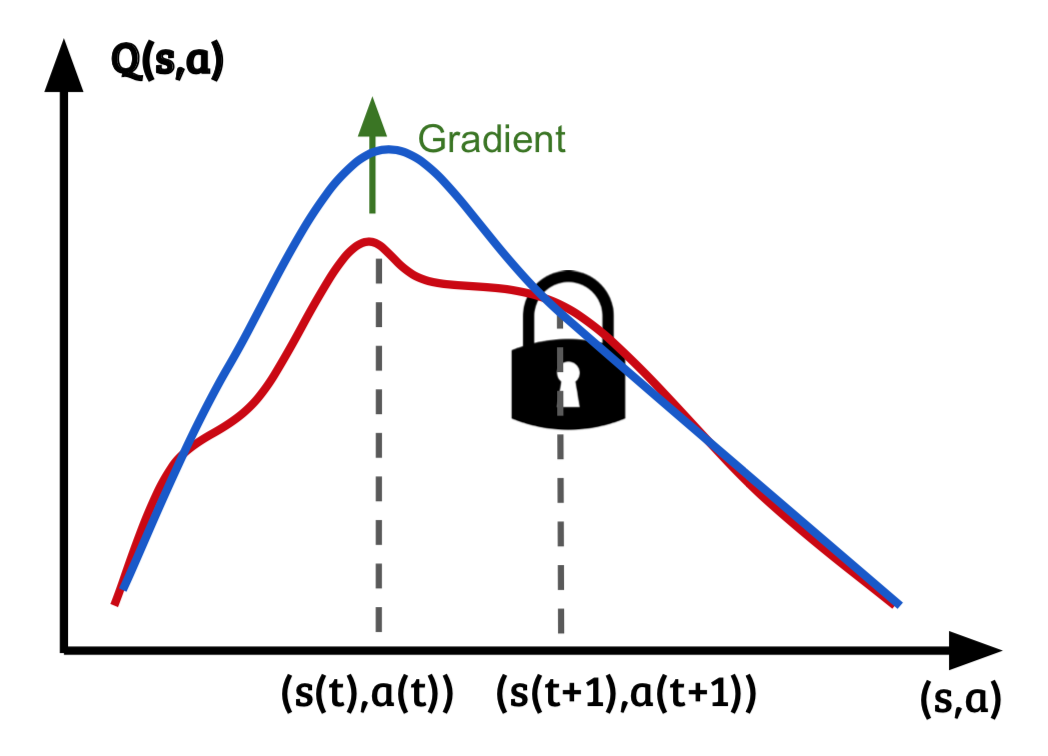
GRAC: Self-Guided and Self-Regularized Actor-Critic |
|
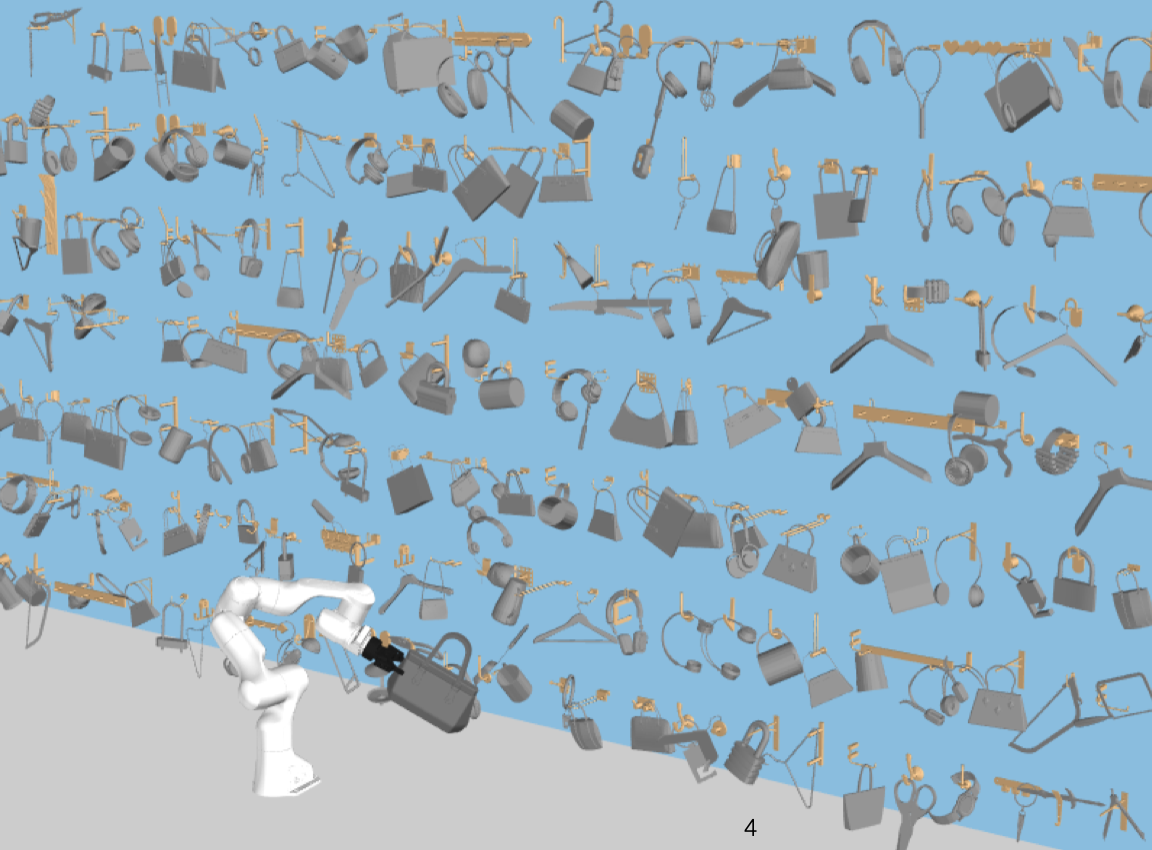
OmniHang: Learning to Hang Arbitrary Objects Using Contact Point Correspondences and Neural Collision Estimation |
|
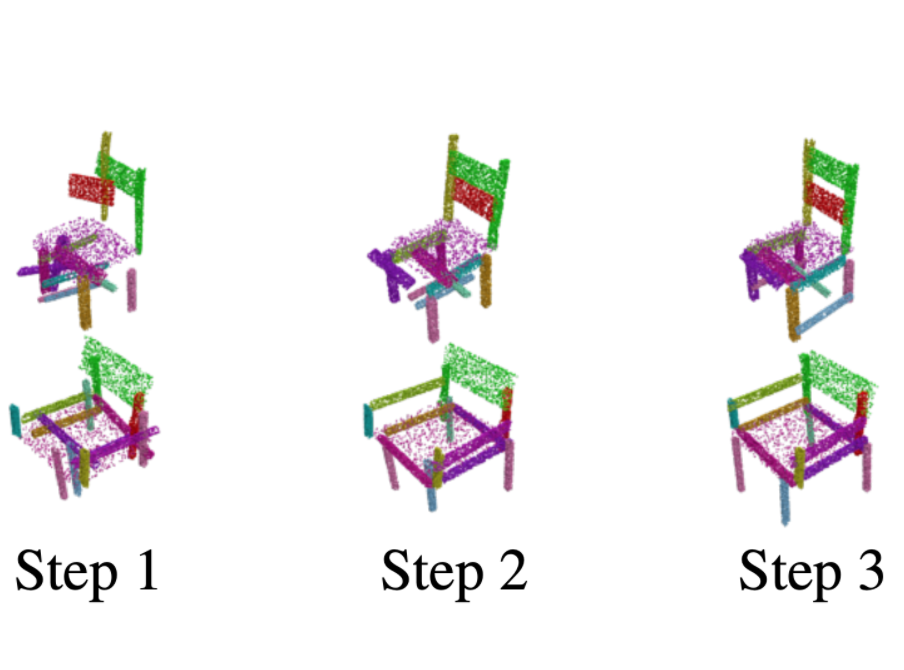
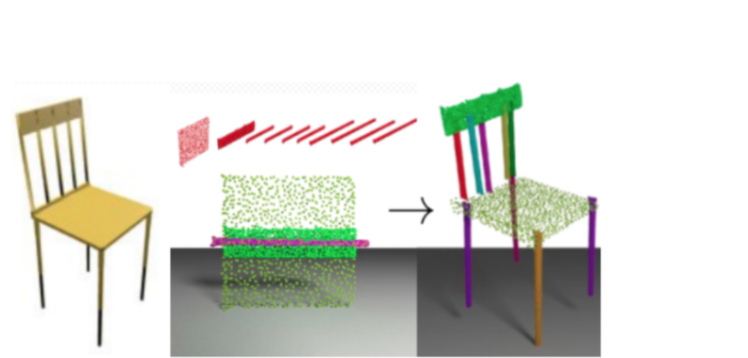
Generative 3D Part Assembly via Dynamic Graph Learning |
|
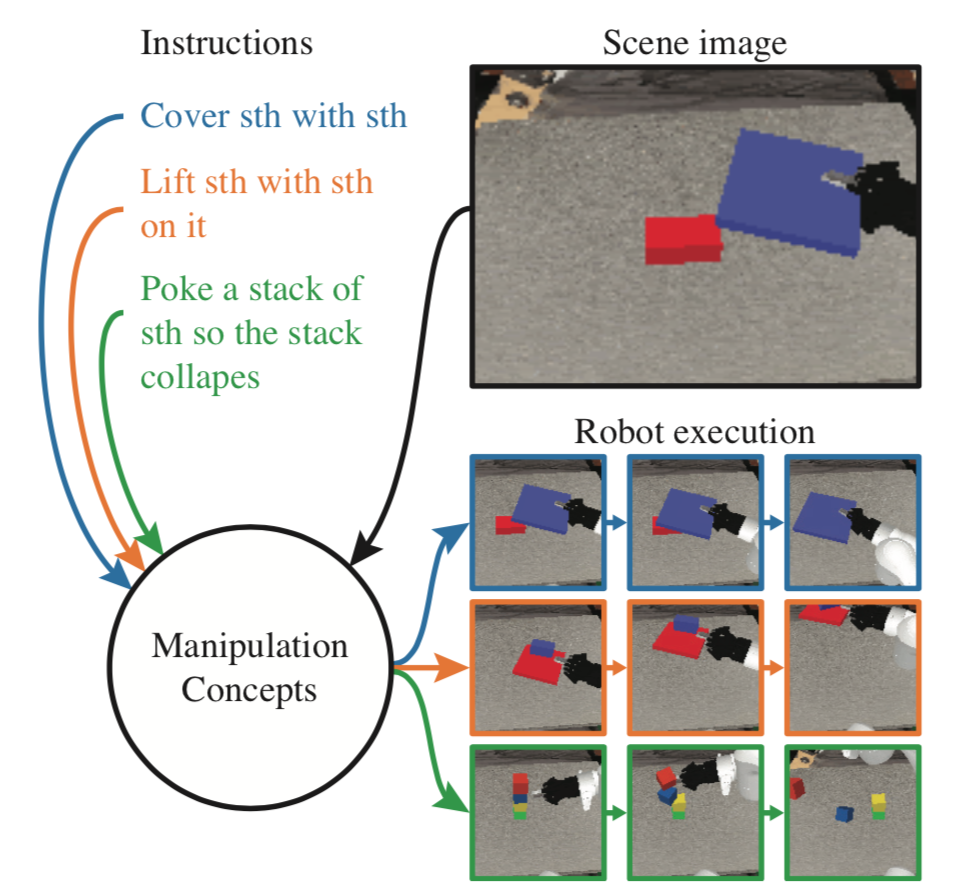
Concept2Robot: Learning Manipulation Concepts from Instructions and Human Demonstrations |
|
Learning 3D Part Assembly from a Single Image |
|
Design and Control of Roller Grasper V2 for In-Hand Manipulation |
|
Learning to Scaffold the Development of Robotic Manipulation Skills |
|
UniGrasp: Learning a Unified Model to Grasp with Multifingered Robotic Hands |
|
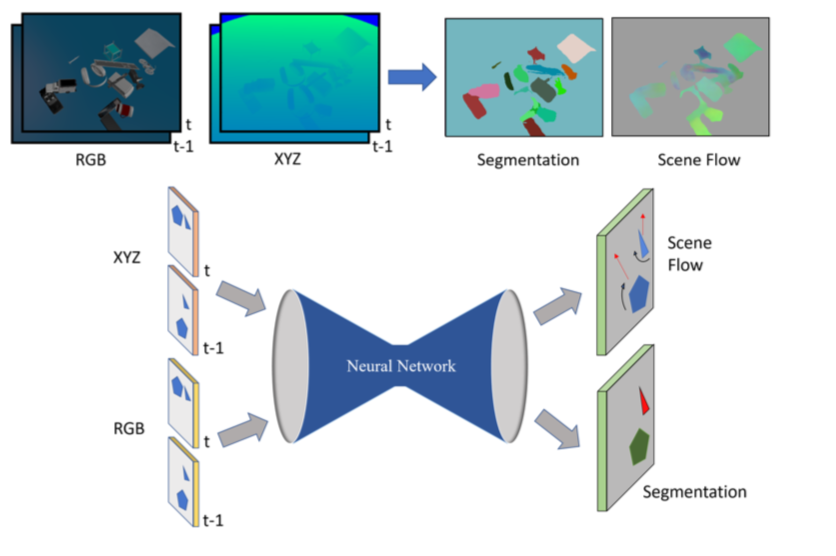
Motion-based Object Segmentation
based on Dense RGB-D Scene Flow |
|
Cross-modal Attribute Transfer for Rescaling 3D Models |

Lin Shao
Assistant Professor at
Department of Computer Science, School of Computing
National University of Singapore
Department of Computer Science, School of Computing
National University of Singapore
Email: linshao at nus dot edu dot sg
Office:COM2-03-03
Office:COM2-03-03